


Опции для роботов KUKA
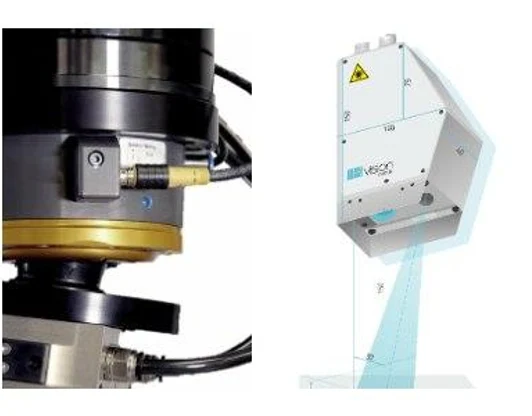
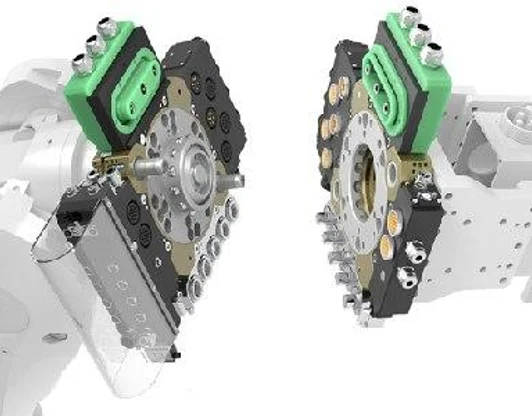
🟠Программные опции Эти опции расширяют функциональность стандартного ПО робота и позволяют гибко настраивать систему под задачи заказчика. • KUKA.SystemSoftware — базовый пакет ПО для управления роботом. Обеспечивает все стандартные функции: управление движением, настройку программ, диагностику. • KUKA.WorkVisual — графическая среда для конфигурирования и диагностики. Позволяет создавать проекты, задавать сеть связи между контроллерами и периферией. • KUKA.HMI — интерфейс оператора для удобного управления роботом и мониторинга работы. • KUKA.ConveyorTech — позволяет роботу синхронизировать движение с конвейерами. Актуально для логистики, паллетизации, упаковки. • KUKA.RoboTeam — объединяет до 6 роботов в единую систему с синхронным движением. • KUKA.SafeOperation — контролирует зоны безопасности, позволяет работать рядом с человеком. • Path Mode — повышает точность следования траектории, используется для лазерной сварки, герметизации, резки. • Dynamic Mode — ускоряет движение, сокращая цикл на 10%, полезно в серийном производстве. • KUKA.LoadDataDetermination (LDD) — измеряет массу и центр тяжести инструмента, повышая точность позиционирования и повторяемость. • KUKA.mxAutomation — интеграция с PLC: программист может управлять роботом простыми командами ПЛК, не зная KRL. • KUKA.SafeRangeMonitoring – позволяет конфигурировать диапазоны перемещений каждой из осей робота, в которых робот будет отслеживать скорости и углы поворота осей робота, а также останавливать робот перед сконфигурированными запрещенными зонами. • KUKA.SafeSingleBrake – используется, когда робот продолжает работу, а оператор выполняет операции на неподвижном оборудовании. • KUKA.Safety AC – позволяет передавать значение кода активации системы безопасности во внешние системы для анализа или контроля. • KUKA.Ethernet KRL – позволяет обмениваться XML данными или двоичными данными с внешними системами через Ethernet KRL Interface. • KUKA.RobotSensorInterface – позволяет обмениваться данными между роботом и внешними датчиками, обрабатывать входящую информацию циклически и корректировать движение робота в процессе его перемещения. • KUKA.FastSendDriver – позволяет организовать коммуникацию в режиме реального времени с внешними сенсорными системами для обмена даннымиоположении робота. • KUKA.ForceTorqueControl – позволяет обрабатывать данные, получаемые с силомоментного датчика, устанавливаемого на фланце робота, и корректировать перемещения робота, в соответствии с усилием, требуемым для технологического процесса. • KUKA.VisionTech – применяется для определения координат объектов, для последующей их обработки, измерений, распознавания штрихкодов и текста. • KUKA.PickControl – технологический пакет для задач, связанных с сортировкой/укладкой объектов, движущихся по конвейеру, как одним, так и несколькими роботами. • KUKA.PalletTech – позволяет упростить запуск приложений связанных с паллетированием, задавать конфигурации продукции и шаблоны раскладки в графическом интерфейсе на ПК. • KUKA.UserTech – позволяет создавать собственные технологические пакеты и программы. • KUKA.ExpertTech – опция добавляет новые формуляры, в которых возможно выбрать требуемый тип перемещения, включая относительные, или назначить необходимый тип данных для конкретного перемещения (E6POS, POS, FRAMEилиE6AXIS, AXIS). • KUKA.HMI Easy – позволяет создавать собственный интерфейс для SmartPad и отображать в нём необходимые параметры техпроцесса. • KUKA. VirtualRemotePendant – представляет собой виртуальный KUKA smartPad. Опция устанавливается на ПК. Коммуникация с контроллером робота осуществляется через KLI. • KUKA.PROFINET – позволяет подключить робота в промышленную сеть ProfiNet. • KUKA.EthernetIP – позволяет подключать робота в промышленную сеть Ethernet/IP в качестве сканера и/или адаптера. • KUKA.OptionalNetworkInterface – активирует и позволяет сконфигурировать имеющийся на роботе физический интерфейс робота KONI под различные сетевые задачи, не критичные ко времени исполнения, например, архивирование или сбор данных. • KUKA.DeviceConnector pre-installed – позволяет подключить робота к облачным сервисам KUKA. • KUKA.DeviceConnector – позволяет подключить робота к пользовательским облачным сервисам, организовать сбор и отслеживание технологических данных и параметров робота. • KUKA.RS232 – обеспечивает возможность коммуникации с периферийным оборудованием по протоколу RS232. • KUKA.USB Port Security – позволяет блокировать/разблокировать USB-порты на контроллере и на SmartPad. • KUKA.GripperSpotTech – содержит в себе формуляры для управления захватами любых типов, а также формуляры дляработы с точечной сваркой. • KUKA.ServoGun Basic – обеспечивает управление серво-клещами для точечной сварки. • KUKA.ArcTech Basic – позволяет сконфигурировать коммуникацию со сварочным источником. • KUKA.SeamTech Finding/Tracking – позволяет находить и определять актуальные координаты будущего сварного шва, а также отслеживать изменение сварочного шва и корректировать траекторию сварки в реальном времени. • KUKA.TouchSense – позволяет определить актуальное положение детали, и, если оно отличается от исходного, скорректировать программу с учётом определённых смещений. • KUKA.TRACC TCP – предназначена для автоматической проверки и корректировки координат X, Y, Z TCP инструмента с помощью фотоэлектрического барьера. • KUKA.ArcTech Multilayer – позволяющим делать многослойные сварные швы, при этом программируется только корневой шов. • KUKA.GlueTech – обеспечивает синхронизацию перемещения робота и подачи наносимого состава, обеспечивая равномерное нанесение. • KUKA.LaserTech – позволяет конфигурировать и программировать приложения, связанные с лазерной сваркой или резкой. • KUKA.CNC – позволяет интегрировать в контроллер робота ядро системы ЧПУ, что позволяет выполнять управляющие программы в G-Code в системе управления робота. • KUKA.RemoteSupportView – позволяет получить удаленный доступ к контроллеру робота или компьютеру, на котором установлен RSV сервер. • KUKA.KRMSGNET – позволяет отправлять сообщения на внешние ресурсы. • KUKA.VectorMove – позволяет сделать робота податливым в направлении заранее заданного вектора в декартовой системе координат. • KUKA.MaintenanceMSG – позволяет выводить на экран SmartPAD необходимые сообщения. 🟠Аппаратные и механические опции • Positioning Accuracy — модификация робота для повышения точности позиционирования. Применяется для операций с высоким требованием к прецизионности. • Механические ограничители осей — ограничивают диапазон поворота, предотвращают столкновения. • Юстировочные наборы (SEMD/MEMD) — комплекты для калибровки робота, повышают точность повторного установления координат. • Монтажные основания/пьедесталы — стандартные и индивидуальные опоры для робота. • Machine frame mounting — установка робота на специальные рамы для гибкости интеграции. • Транспортировочная рама — облегчает перевозку потолочных или тяжёлых роботов. 🟠Инженерные и эксплуатационные опции • Цвет по RAL — индивидуальная окраска под корпоративный стиль заказчика. • Продление гарантии — до 36 месяцев при соблюдении регламента обслуживания. • PURGE option — обеспечивают избыточное давление внутри корпуса робота, защищая от пыли и влаги. • Энергоподводы для осей (A1–A6) — подвод кабелей, газа и охлаждения к инструменту. • Комплекты разъёмов к энергоподводам — позволяют легко подключать периферийное оборудование. 🟠Опции для позиционеров • Панель интерфейсов — единый блок подключения для кабелей и коммуникаций. • Энергоподводы для позиционеров — комплекты для сварки (дуговой, лазерной, точечной), фрезеровки. • Комплекты разъёмов — для интеграции позиционера в производственную систему. • Прокладка энергоподвода — варианты через планшайбу, заднюю бабку или полый вал. • Задняя бабка с компенсацией — допускает погрешность установки ±5 мм и ±5°. • Подключение сварочной массы – варианты подключения через скользящий контакт или через энергоподвод. • Механический стопор – используется для дополнительной защиты позиционера от перемещений во время загрузки-разгрузки тяжёлых изделий и оснастки. 🟠Линейные оси (KUKA KL) • Линейные оси серии KL позволяют расширить рабочую зону робота, перемещая его вдоль рельсов. KL 100–KL 5000 — модели разной грузоподъёмности и длины. • Возможность перемещения робота вдоль станка или заготовки. • Доступны различные длины рельс. • Возможность установки нескольких роботов на одну ось. • Доступны варианты с энергоподводами и кабельными каналами. • KL 4000 и KL 5000 — тяжёлые версии для крупногабаритных изделий. 🟠Дополнительные решения • Системы крепления основания — стандартные и индивидуальные. • Комплекты кабельных трасс — для удобной прокладки коммуникаций. • IP-защита (IP65–IP67) — для эксплуатации в тяжёлых условиях. • Сервисные наборы и юстировка — для обслуживания и точной настройки.





Выбор инструмента зависит от задач заказчика и подбирается индивидуально.